Introduction to Inverse Kinematics
This tutorial and demo carries on from where the nurbs lathe avatar demo ends so please complete that demo before starting this.
When animating the avatar for the nurbs lathe avatar tutorial, the model was posed by rotating the joints via a lever. This type of animation is known as Forward Kinematics (FK). Inverse Kinematics (IK) is different in that we pose the model by dragging IK points to positions and letting the computer calculate the rotation values from these positions.
The Basic Idea
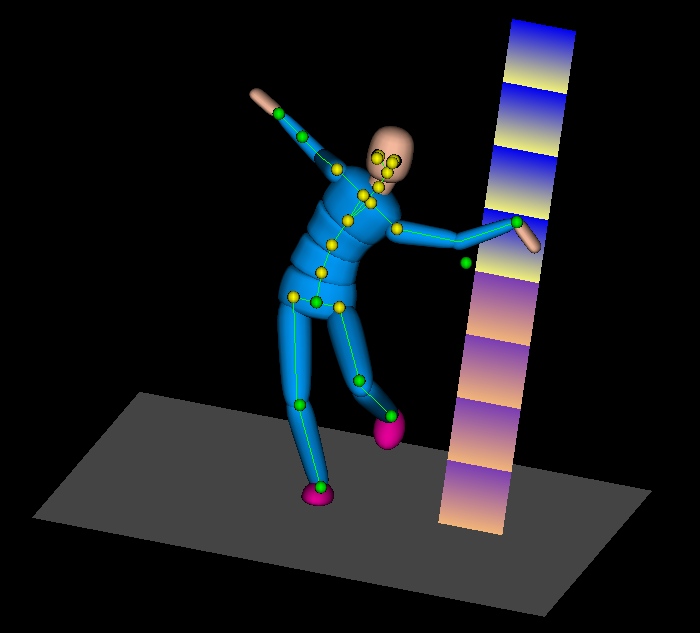
Before we start first delete the existing Anim node and plug in a brand new one to replace it. To set up the IK points for the legs tick the ik fields for the pelvis, knees ankles, elbows and wrists and tick the pin fields for the pelvis, ankles and wrists. You will see that the part’s we set the ik fields show green points where the pivotPoints were located. These green are the IK points. To capture the IK points for the pose at this stage right click on any part node in the scene tree and select: capture IK points.13/14 Pose the first and 2nd key frames
The IK parts that are pinned (those that have their pin fields ticked) will typically be located exactly at the part’s pivotPoint while the non pinned IK points are used more as guides rather than exact locations for the joints. By having the ankle joints pinned, we don't have to worry about feet sliding about on the ground as a result of posing the pelvis, hips and knee joints, the feet will always be located where they are pined. This makes IK well suited for the legs especially when animating our avatar to walk, run, dance, jump etc..At times you may notice this sort of thing happening:
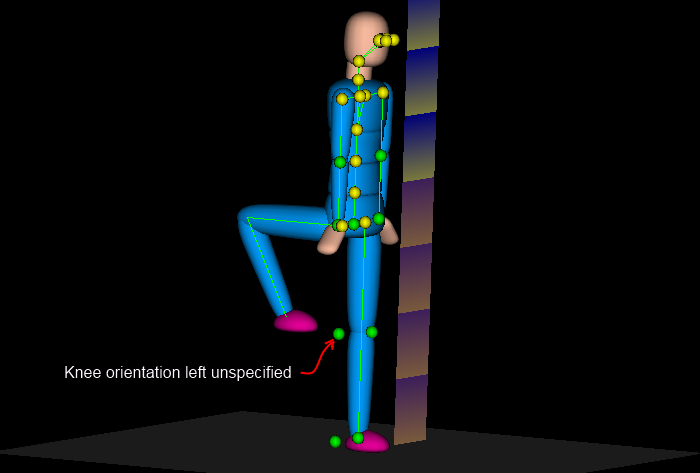
This is only because the knee is left located exactly between the hip and ankle joints and so the orientation of the knee can not be calculated. This is easily solved by dragging the knee IK point to a location where it is not exactly in line from the the hip to the knee. if you were to imagine joining the dots, the goal is to have the hip, knee and ankle control points specify a triangle, not a straight line.
[[3d Modelling Software] [Tutorials] [Forum] [Features] [Download] [Gallery] [FAQ] [Chat] [Avatars] [Links] [Thyme]